



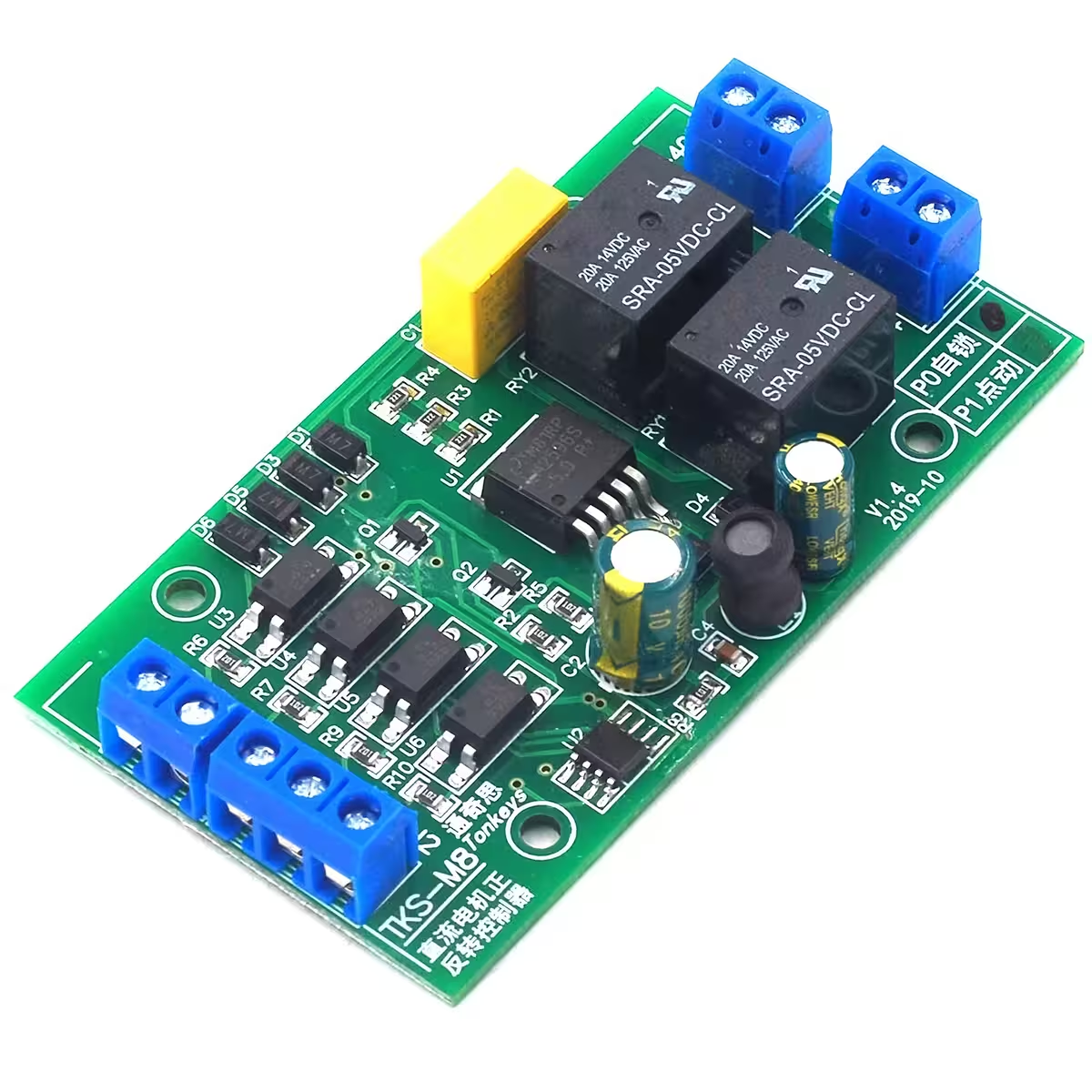
DC-motorstyrning för fram/back – enkel kontroll utan externa komponenter
Har du ett linjärt ställdon, en reversibel mekanism eller ett DIY-projekt som kräver exakt riktningskontroll? Utan en dedikerad modul slutar det ofta med krångliga reläer, transistorer och komplicerad kabeldragning. Denna DC-motorstyrning löser allt i en kompakt modul: anslut strömkälla, motor och knappar – så är du igång på bara några minuter.
Observera: Motorn får samma spänning som strömkällan. Spänningen är inte reglerbar via denna styrenhet.
Varför välja denna modell? (Huvudfördelar):
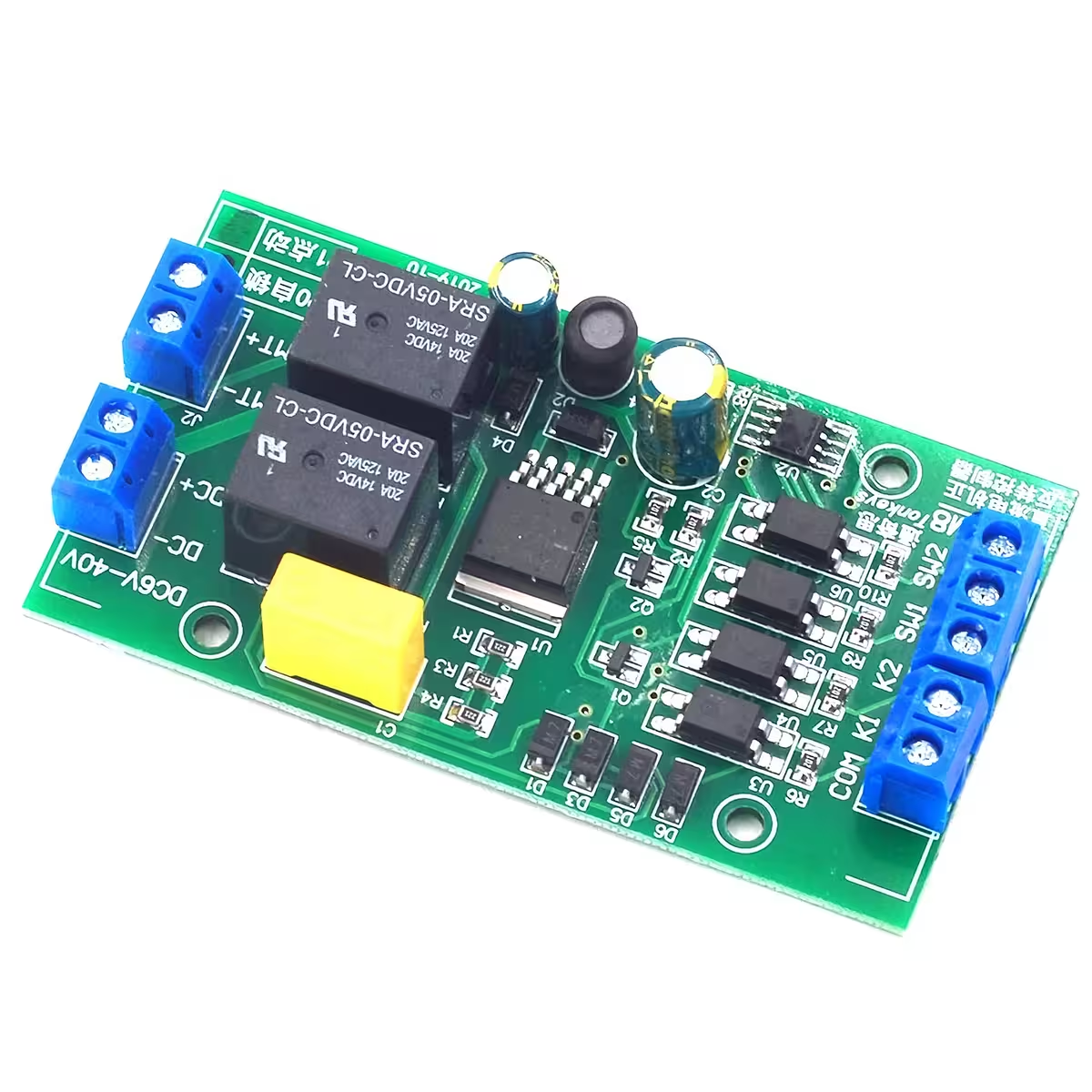
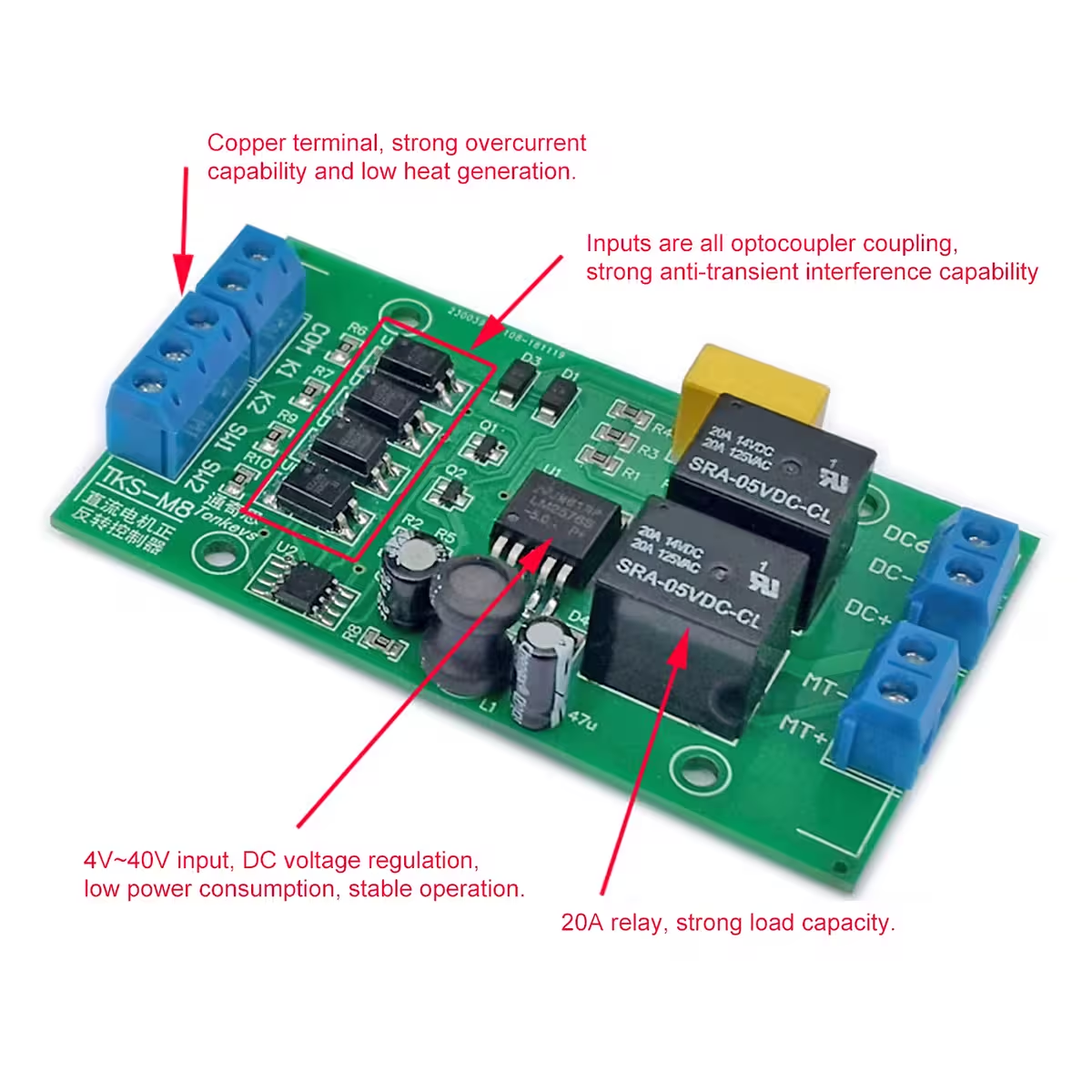
- Brett spänningsområde: 4–40V DC — fungerar med LiPo-batterier, labbaggregat eller nätaggregat utan modifieringar
- Utström upp till 20A — hanterar motorer med höga startströmmar, lämplig för laster upp till ca 80W
- Två valbara lägen: PO och P1 — välj mellan självhållning (start med kort impuls) och jog-läge (aktivt så länge knappen hålls nedtryckt)
- Universella active-low-ingångar — anslut enkla knappar, mekaniska NO-gränslägesbrytare eller 3-tråds NPN-sensorer direkt, utan extra motstånd
- Integrerade gränslägesbrytare SW1/SW2 — automatisk stopp vid ändläge eliminerar risken för mekanisk blockering eller överbelastning
- Livslängd >150 000 cykler — hög driftsäkerhet för applikationer med daglig användning
- Låg egenförbrukning: 0,6W aktiv / 0,1W standby — dränerar inte batteriet när systemet är i vänteläge
Detaljer och prestanda
Styrenheten använder en arkitektur baserad på active-low-ingångar: en ingång aktiveras när spänningen sjunker under 2V. Det innebär att vanliga knappar, NO-gränslägesbrytare (normal-open) och NPN-NO-sensorer kan anslutas direkt utan mellankomponenter.
Svarstiden är ≈20ms för K1/K2-kommandon och ≈50ms för gränslägesbrytarna SW1/SW2 — tillräckligt snabbt för dynamiska applikationer och tillräckligt stabilt för att undvika felaktiga aktiveringar.
Vid högre spänningar bör strömmen begränsas: vid 12V kan du använda upp till 20A, medan det vid 24V rekommenderas att begränsa till ca 10A för säker termisk drift över tid. Använd alltid en säkring med lämplig dimensionering och kablar anpassade för belastningen.
| Parameter | Värde / Detalj |
|---|---|
| Driftspänning | DC 4–40V (rekommenderat 6–36V) |
| Max utström | upp till 20A (vid 12V) |
| Rekommenderad motoreffekt | upp till ca 80W |
| Egenförbrukning (aktiv) | ca 0,6W |
| Egenförbrukning (standby) | ca 0,1W |
| Ingångssignal | Active-low (aktiveras vid spänning < 2V) |
| Svarstid K1/K2 | ≈ 20ms |
| Svarstid SW1/SW2 | ≈ 50ms |
| Driftlägen | PO (självhållning) / P1 (jog) |
| Livslängd | >150 000 cykler |
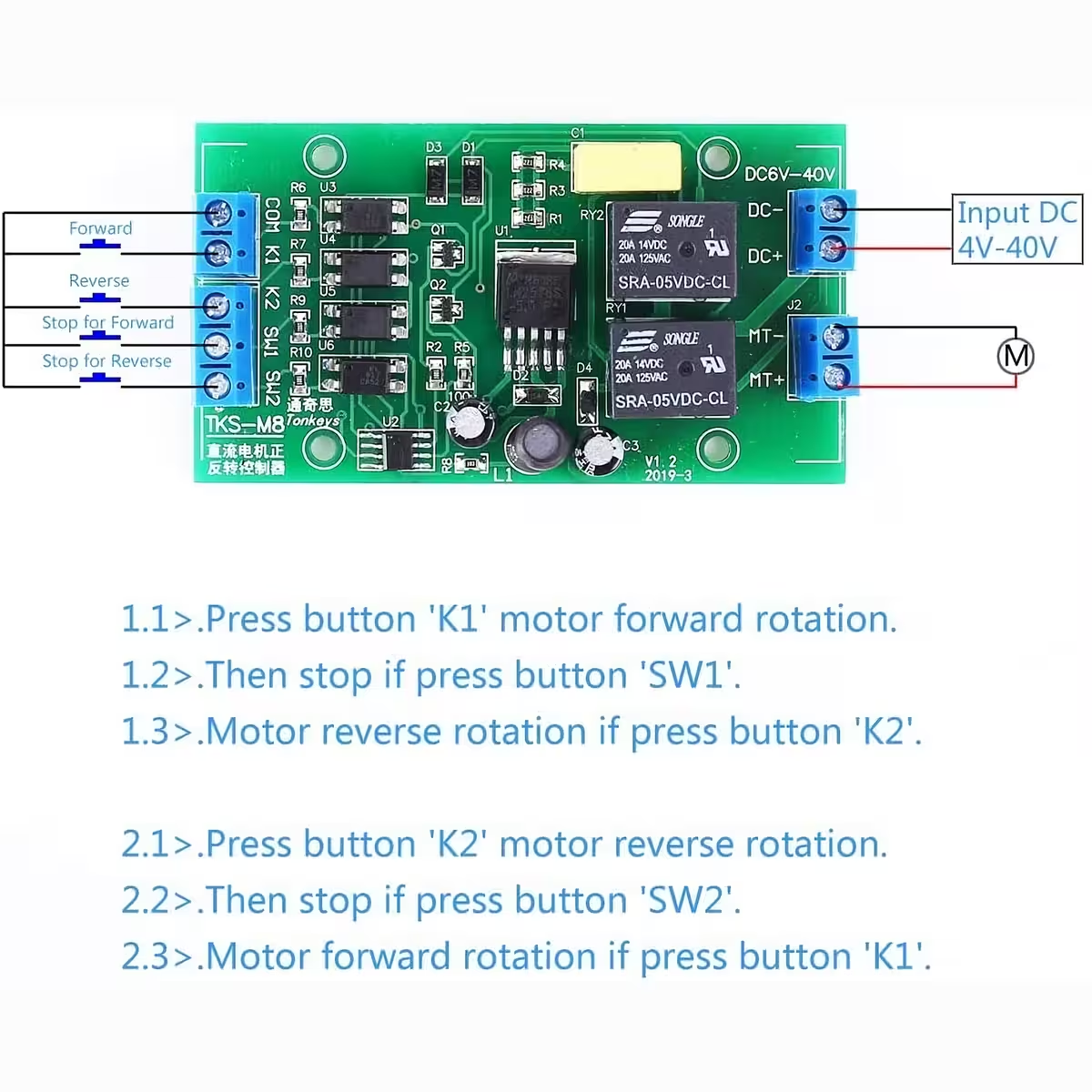
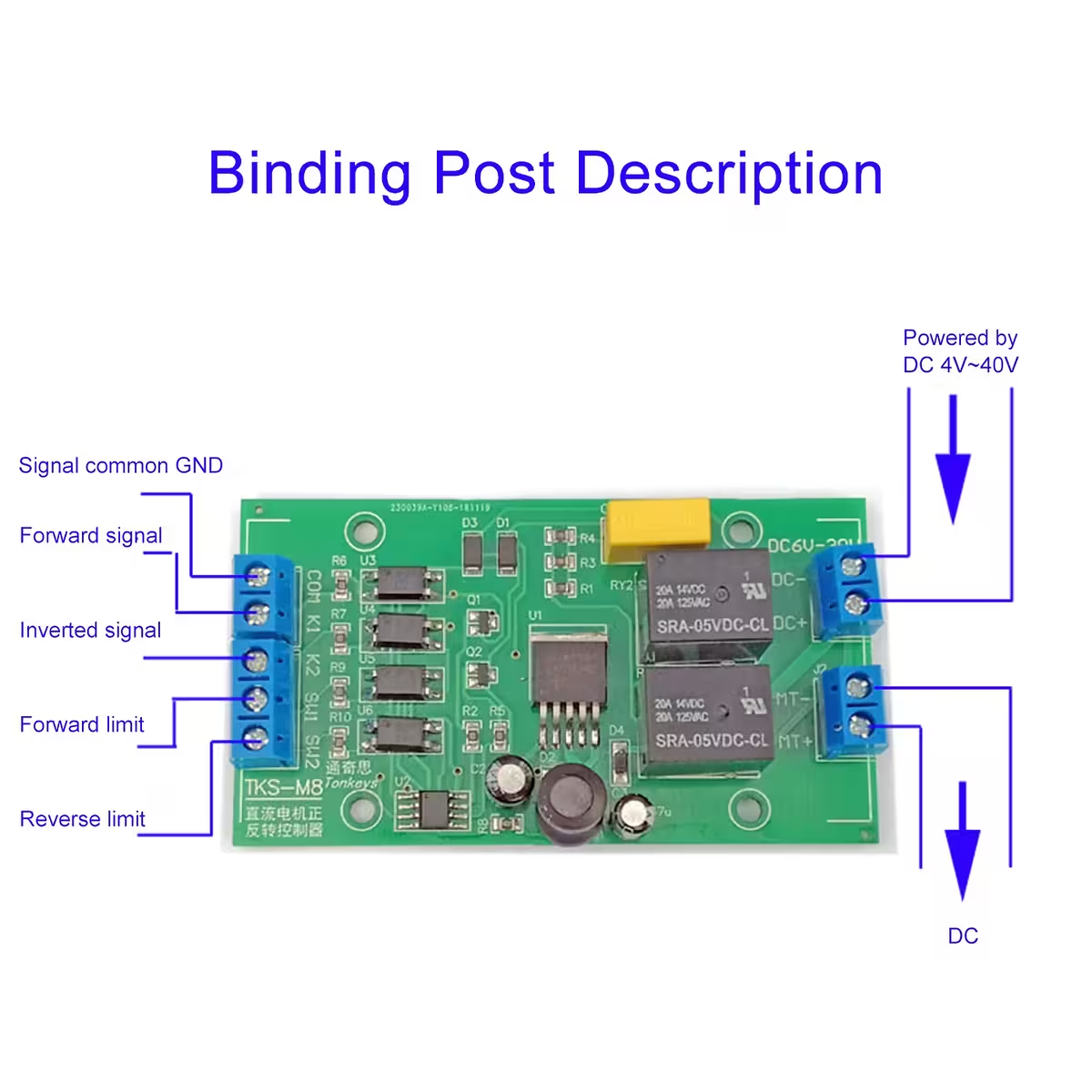
| Ingång K1 | Kommando framåt (active-low) |
| Ingång K2 | Kommando bakåt (active-low) |
| SW1 | Gränsläge framåt (NO rekommenderas) |
| SW2 | Gränsläge bakåt (NO rekommenderas) |
| VIN+ / VIN- | Strömförsörjning DC 4–40V |
| Motor+ / Motor- | Utgång till DC-motor |
Programmering och användning
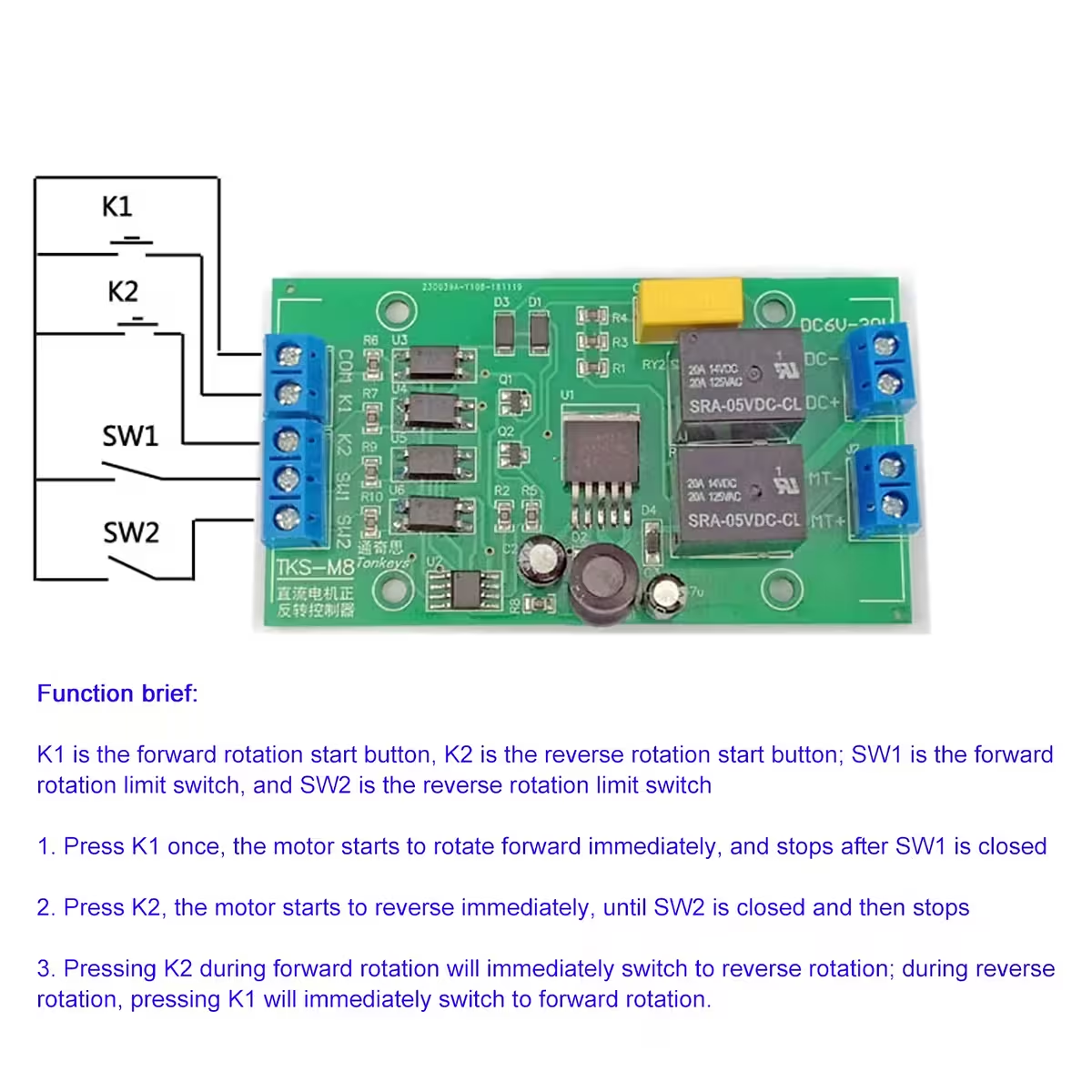
Läge PO (Självhållning): En kort impuls på K1 eller K2 startar motorn. Den fortsätter att gå tills motsvarande gränslägesbrytare aktiveras eller ett motstående kommando tas emot. Perfekt för automatisering.
Läge P1 (Jog): Motorn är endast aktiv så länge kommandot K1 eller K2 hålls aktiverat. Perfekt för finjustering och manuell positionering.
- Anslut strömkällan till VIN+ och VIN– (observera polariteten).
- Anslut DC-motorn till Motor+ och Motor–.
- Välj driftläge: PO för självhållning eller P1 för jog.
- Anslut knappar eller styrsignaler till K1 (framåt) och K2 (bakåt) — active-low-ingångar.
- Anslut eventuella mekaniska gränslägesbrytare eller NPN-NO-sensorer till SW1 och SW2.
- För automatisk cyklisk rörelse A→B→A: anslut NO-brytarna från position A till K1 och från position B till K2, och lämna SW1/SW2 oanslutna.
- För Arduino-integration: anslut Arduino GND till styrenhetens GND, den digitala pinnen för framåt till K1 och för bakåt till K2. Sätt pinnarna som OUTPUT och skriv LOW för att aktivera.
- Kontrollera motorns startström och installera en säkring med lämplig dimensionering på matningsledningen.
Paketinnehåll
- 1 × DC-motorstyrning (fram/back), PO/P1-lägen
Vanliga frågor
Vad innebär active-low och varför är det viktigt?
Ingången aktiveras när spänningen sjunker under 2V — det vill säga när den kopplas till jord (GND). Enkla knappar, NO-gränslägesbrytare och NPN-sensorer fungerar precis så. Du behöver inga extra motstånd eller inverterande logik.
Vad är skillnaden mellan läge PO och P1?
I PO-läge startar en kort impuls motorn som sedan går autonomt tills den når ett gränsläge eller får ett nytt kommando — användbart för automatisering. I P1-läge går motorn bara så länge kommandot hålls aktivt — användbart för exakt kontroll eller manuell styrning.
Kan jag ansluta styrenheten direkt till en Arduino?
Ja. Anslut Arduino GND till styrenhetens GND och använd två digitala pinnar inställda som OUTPUT. När pinnen är LOW är kommandot aktivt. Arduino hanterar logiken och styrenheten hanterar effekten — inga mellankomponenter krävs.
Kan jag använda gränslägesbrytare med NC-kontakt (normal-closed)?
Styrenheten är optimerad för NO-brytare (normal-open). NC-kontakter inverterar logiken och kan orsaka oönskat beteende. Använd alltid NO-kontakter för SW1 och SW2.
Behövs kylfläns vid maxström?
Vid strömmar nära 20A eller vid intensiv drift bör du säkerställa god ventilation och övervaka temperaturen. För kontinuerlig drift med hög belastning kan en liten kylfläns eller forcerad ventilation förlänga livslängden avsevärt.
Hur skapar jag automatisk cyklisk rörelse utan timer?
Anslut NO-brytarna från position A till K1 och från position B till K2, och lämna SW1 och SW2 oanslutna. När motorn når ändläget aktiverar brytaren automatiskt kommandot för motsatt riktning — motorn pendlar kontinuerligt utan extern styrning.
Presentationsvideo
Fotogalleri












Recensioner
Det finns inga recensioner än.