
 EU
EU 





Kontrollmodul med Inbyggd Driver för Stegmotor – Prestanda och Precision i Industriella Automationer
Denna kontrollmodul med inbyggd driver är speciellt designad för steppmotorer med en axel, och erbjuder en komplett lösning för industriella automationer, CNC-kontroll, robotik och mekaniska förpackningssystem. Den fungerar oberoende eller i kombination med andra system, utan att behöva Arduino eller Python, vilket gör den idealisk för industriella kontrollapplikationer och precis positionering av stegmotorer.
Huvudfunktioner
- Inbyggd Kontroller och Driver: Styr stegmotorn och övervakar driftstatusen i realtid.
- Framåt och Bakåt Rotation: Byt rotationsriktning via knapp eller potentiometer, automatiskt beroende på arbetsläge.
- 3 Kontrolllägen: Förinställt läge, kontroll via externa knappar eller ytterligare drivare.
- 9 Arbetsprogram: Inkluderar program för olika applikationer: Framåt/Bakåt, Fördröjning, Loopar, Automatisk låsning, Rotationshastighet och mer.
- HD LCD Skärm: Visar hastighet, antal cykler och kontrollparametrar, med minnesfunktion och hög precision.
Tekniska parametrar
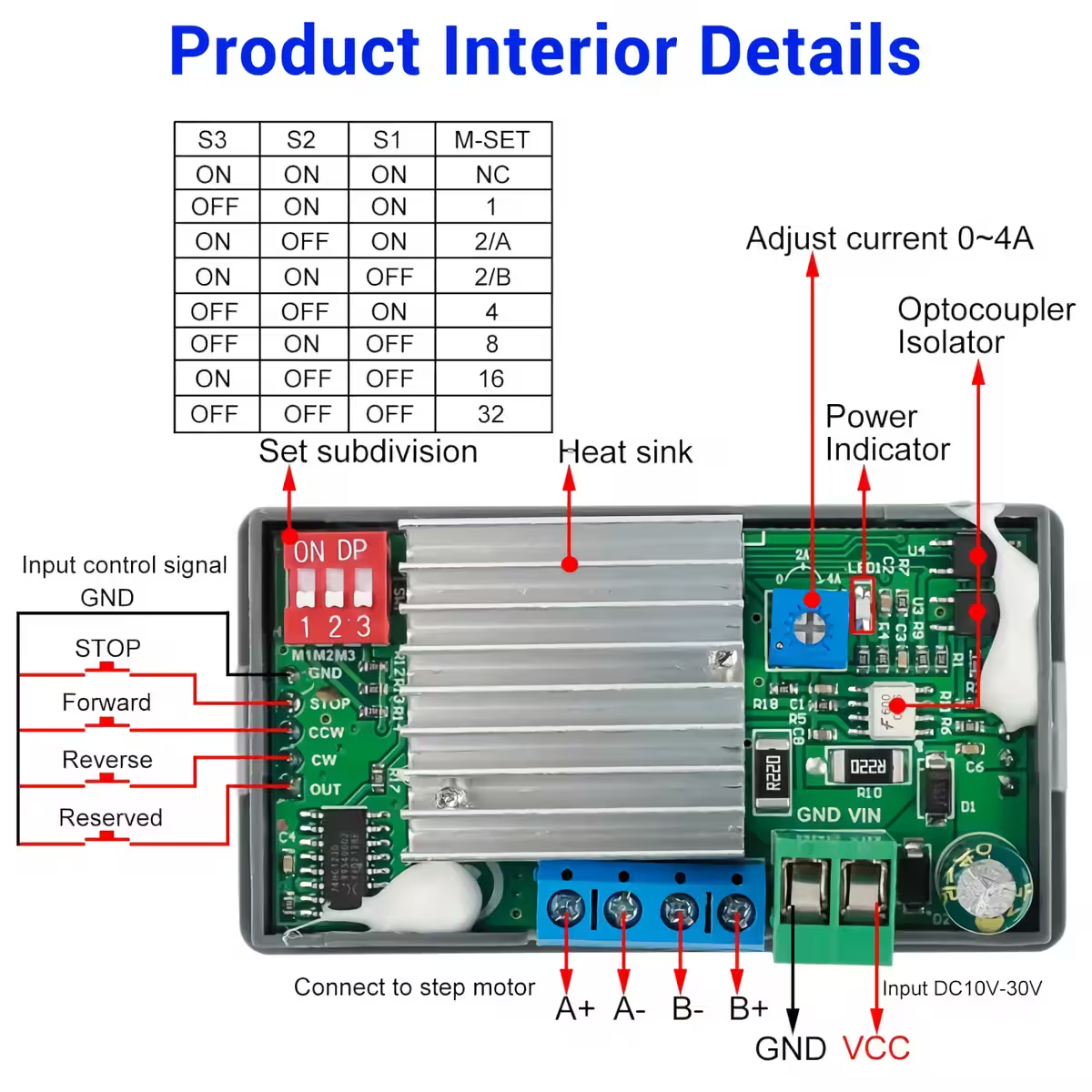
- Ingångsspänning: DC 5V-30V
- Utgångsström/driver: 4A (max)
- Kontrollaxlar: En axel
- Kompatibel motor: Stepper 42/57 (Nema17 / Nema23)
- Kontrollhastighet: 0,1-999 RPM
- Antal impulser framåt/bakåt: 1-9.999.999
- Antal cykler: 1-9.999 eller oändlig loop
- Fördröjning framåt/bakåt: 0,0-999,9 sekunder
- Subdivison: 1/2/4/8/16/32
- Acceleration/deceleration kontroll: Ja
- Skydd mot omvänd polaritet vid ingång: Ja
- Kontrolllägen: Automatisk/Manuell/Inställning
- Arbetstemperatur: -20°C till 85°C
- Arbetsfuktighet: 5% till 95% RH
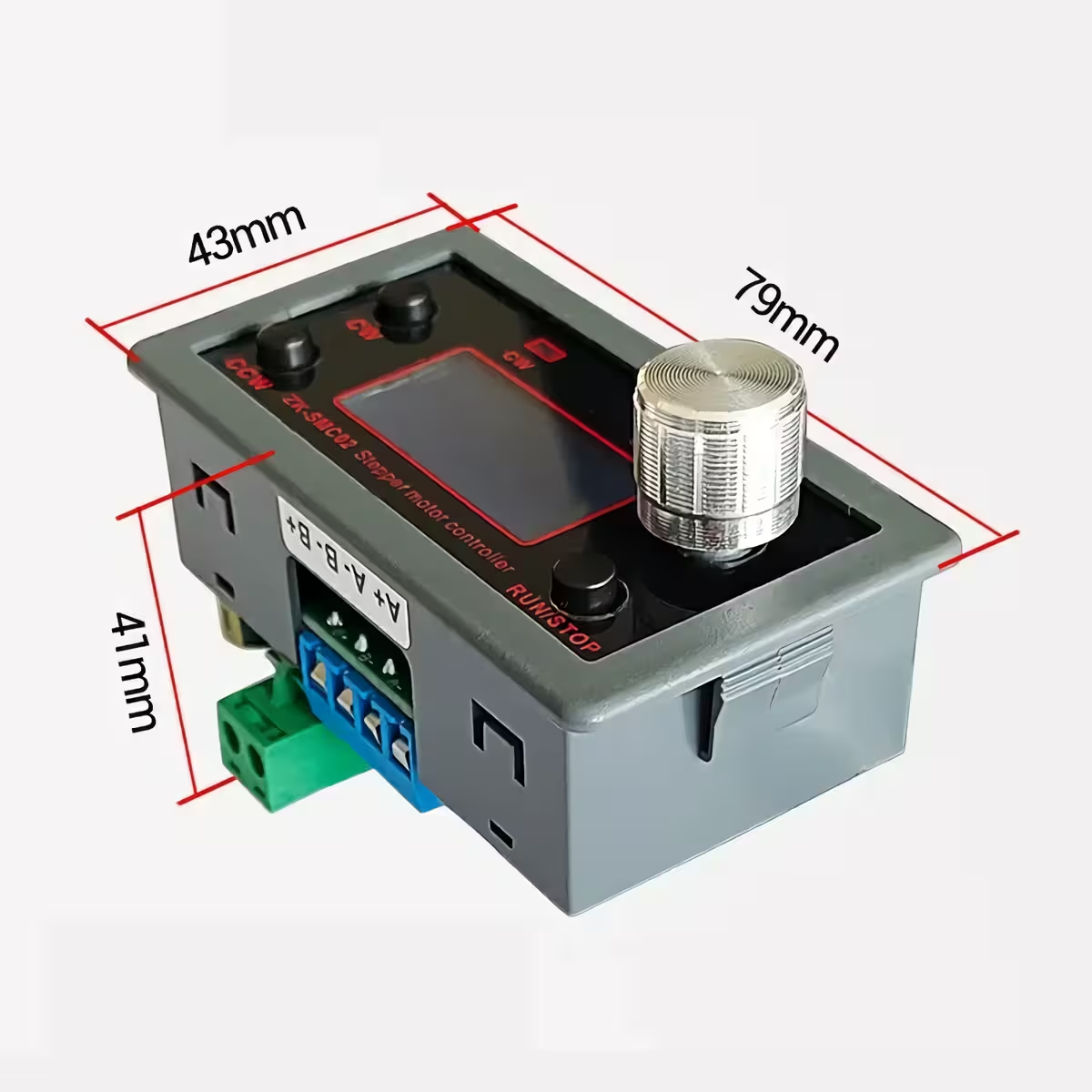
- Modulens dimensioner: 79 x 43 x 41 mm
Konfigurationsmetoder
1. Körgränssnitt
- Första raden visar rotationshastigheten i RPM.
- Andra raden visar fördröjningstid eller antal cykler, som kan ställas in via F-10 menyn.
- CW-knappen: Rotation framåt.
- CCW-knappen: Rotation bakåt.
- RUN/STOP-knappen: Starta/stoppa.
- Potentiometern: Justering av hastighet i båda riktningarna.
- Håll potentiometern >3 sekunder: Ingång till parametrinställningsläge.
2. Parametergränssnitt
- Rotation av potentiometern väljer parametern F-01~F-13.
- Den valda parametern blinkar.
- Tryck på potentiometern för att välja värde.
- Ändra värdet genom att rotera potentiometern eller välja bitarna.
- RUN/STOP-knappen bekräftar parametrarna.
- Spara och avsluta inställningsläget efter >3 sekunder.
3. Ytterligare funktion
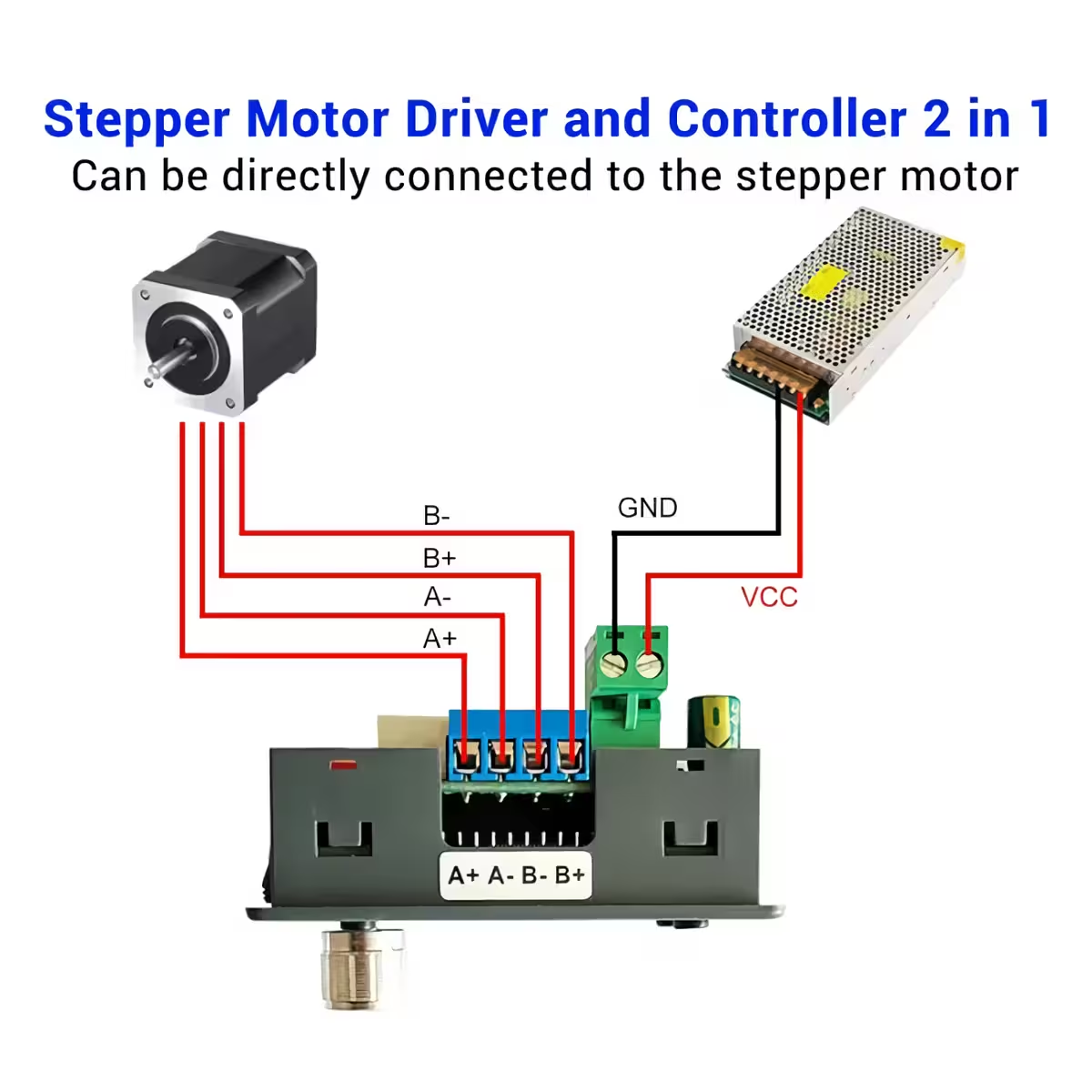
- Oberoende drift genom att endast ansluta strömförsörjning och motor.
- Extern knappanslutning för extra kontroll.
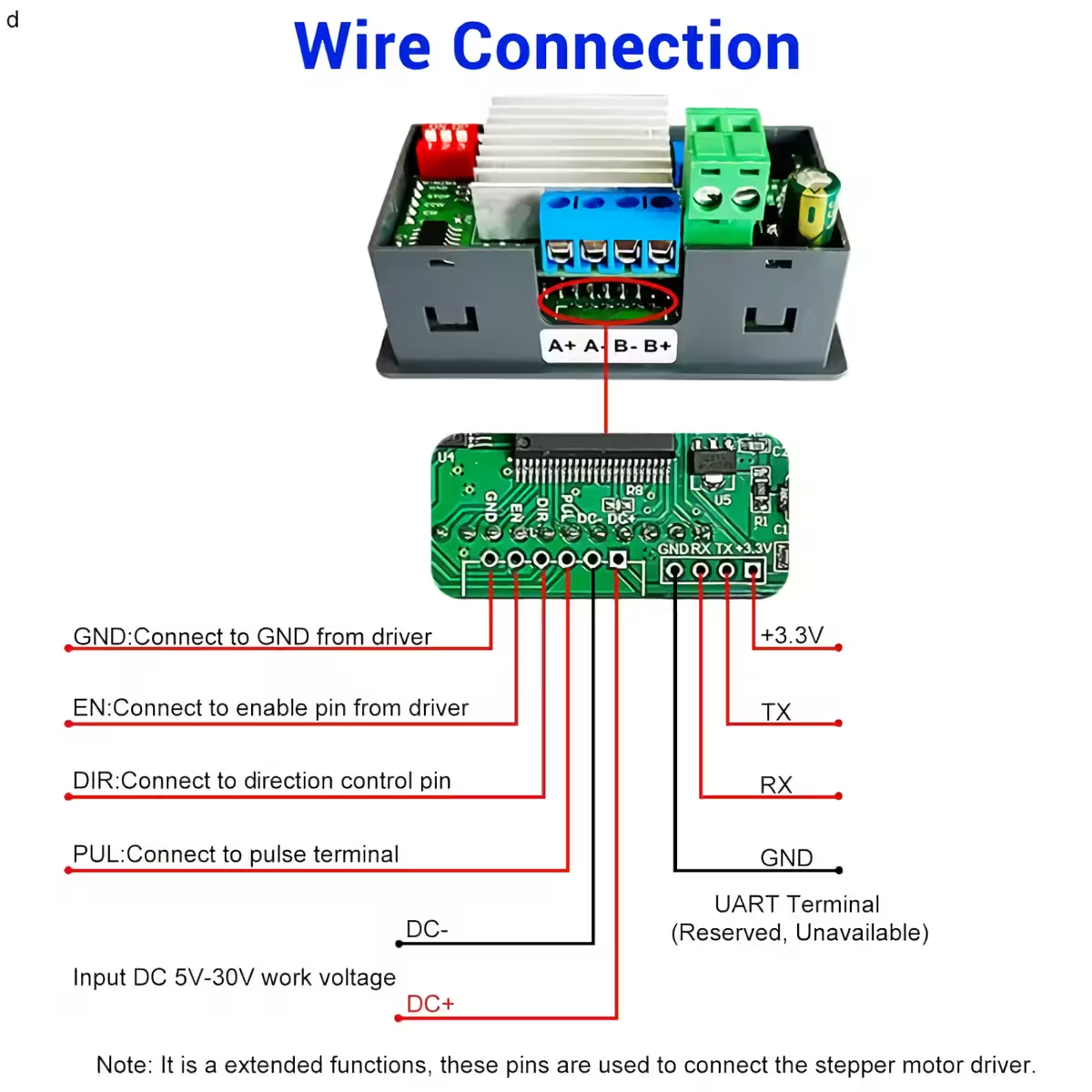
- Kompatibel med andra stegmotordrivare – Auto/Manual/Setup-läge.
4. Arbetsläge
- Automatiskt Kontrollläge: Fungerar med de inställda parametrarna.
- Manuellt Kontrolläge: Kräver anslutning av knappar till terminalerna COM/STOP/CCW/CW.
- Konfigurationsläge: Anslutning till andra stegmotordrivare.
Viktiga Noteringar
- Kompatibel med 2-fas stegmotorer, oavsett antal ledningar (4, 5, 6 eller 8).
- Inkluderar inbyggda drivare och kontroller, men kan även anslutas till externa drivare.
Applikationer
- Industriell automatiserad kontroll
- CNC-maskiner
- Mekanisk förpackning
- Elektronisk bearbetning och testning
- Automatiska monteringslinjer
- Robotik och processautomation
- Positionerings- och rörelsesystem
| Parameter | Funktion | Inställningsintervall | Standardvärde |
|---|---|---|---|
| F-01 → ? | Välj arbetsläge. Se tabellen nedan. | P01~P09 | P01 |
| F-02 | Antal impulser framåt. Ändra biten High/Low genom att trycka på potentiometern: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-03 | Rotationhastighet framåt i RPM | 0.1~999.9 | 10 |
| F-04 | Antal impulser bakåt. Ändra biten High/Low genom att trycka på potentiometern: High 3Bit: Hxxx, Low 4Bit: xxxx | 1~9999999 | 1600 |
| F-05 | Rotationhastighet bakåt i RPM | 0.1~999.9 | 10 |
| F-06 | Antal arbetscykler (‘—-’ betyder oändlig loop) | 0~9999 eller oändlig loop | 1 |
| F-07 | Fördröjning i framåtpositionen i sekunder. ±0.2s | 0.0~999.9 | 0 |
| F-08 | Fördröjning i bakåtpositionen i sekunder. ±0.2s | 0.0~999.9 | 0 |
| F-09 | Antal impulser för en rotation. Enheten är 10. Till exempel, om stegapets vinkel är 1.8 och subdivisionen är 8, kommer antalet impulser för en rotation att vara 360/1.8*8 = 1600. Därför ska det inställda värdet vara 160. | 1~9999 | 160 |
| F-10 | Ställ in LCD-skärmens parametrar: 0: Första raden visar rotationshastigheten i RPM. Andra raden visar fördröjningstiden i sekunder. 1: Första raden visar rotationshastigheten i RPM. Andra raden visar antalet arbetscykler. | 0 eller 1 | 0 |
| F-11 | Ställ in motorns arbetsstatus efter att RUN/STOP-knappen trycks: 0: Långsam nedbromsning och stopp. 1: Stopp omedelbart. | 0 eller 1 | 0 |
| F-12 | Ställ in accelerations-/decelerationsnivån: 001 är långsammast och 100 är snabbast. | 001~100 | 20 |
| F-13 | Ställ in enhetens adress | 001~255 | 1 |
| Arbetsläge | Arbetsprocess |
|---|---|
| F-01 → P01 |
1. Motorn fungerar med potentiometerns rotation. De andra knapparna är inaktiva. 2. Motorn roterar framåt och CW-indikatorn tänds om potentiometern vrids medurs. 3. Motorn roterar bakåt och CCW-indikatorn tänds om potentiometern vrids moturs. |
| F-01 → P02 |
1. Motorn roterar enligt de impulser som ställs in i F-02 och F-04. 2. Motorn stannar efter varje uppsättning av impulser och kan återställas med potentiometern. 3. Loopen upprepas enligt antalet cykler definierat i F-06. |
| F-01 → P03 |
1. Motorn roterar framåt och bakåt enligt de definierade impulserna. 2. Rotationsriktningen framåt eller bakåt bestäms enligt inställningarna i F-02/F-04. 3. Återställ hastigheten via potentiometern. 4. Notera: Stoppa motorn innan du byter riktning. |
| F-01 → P04 |
1. Motorn roterar från F-02/F-04 och stannar, sedan upprepas loopen F-06. 2. Framåtrotation: F-02 → Stopp F-07 → Loop. 3. Bakåtrotation: F-04 → Stopp F-08 → Loop. 4. Återställ RPM via potentiometern. 5. Notera: Stoppa motorn innan du byter riktning. |
| F-01 → P05 |
1. Motorn roterar från F-02/F-04, sedan vrider den tillbaka till början i motsatt riktning och loopen F-06 upprepas. 2. Framåt: F-02 → Stopp F-07 → Loop → Vänd. 3. Bakåt: F-04 → Stopp F-08 → Loop → Vänd. 4. Återställ RPM via potentiometern. 5. Notera: Stoppa motorn innan du byter riktning. |
| F-01 → P06 |
1. Motorn roterar från F-02/F-04, sedan ändras riktningen och loopen F-06 upprepas. 2. Framåt: F-02 → Stopp F-07 → Byt F-04 → Stopp F-08 → Loop. 3. Bakåt: F-04 → Stopp F-08 → Byt F-02 → Stopp F-07 → Loop. 4. Återställ RPM via potentiometern. 5. Notera: Stoppa motorn innan du byter riktning. |
| F-01 → P07 |
1. Motorn roterar enligt impulser och återgår till början i motsatt riktning. 2. Framåt: F-02 → Stopp F-07 → Vänd. 3. Bakåt: F-04 → Stopp F-08 → Vänd. 4. Återställ RPM via potentiometern. |
| F-01 → P08 |
1. Motorn roterar från fördröjningstiden F-07/F-08 och stannar, sedan upprepas loopen F-06. 2. Framåt: F-07 → Stopp F-08 → Loop. 3. Bakåt: F-08 → Stopp F-07 → Loop. 4. Återställ RPM via potentiometern. 5. Notera: Stoppa motorn innan du byter riktning. |
| F-01 → P09 |
1. Motorn roterar framåt från F-02, sedan stannar den för F-07-tiden, roterar sedan bakåt från F-04 och stannar för F-08, loopen upprepas F-06 gånger. 2. Återställ RPM via potentiometern. 3. Notera: Stoppa motorn innan du byter riktning. |












Recensioner
Det finns inga recensioner än.